一篇遥感多模态的论文笔记
源码:https://github.com/danfenghong/IEEE_TGRS_MDL-RS
本文贡献:
提出了一个统一的针对遥感图像分类的多模态深度学习网络MDL-RS。
提出的MDL-RS适用于MML(多模态学习)和CML(交叉模态学习,和MML在训练阶段相同,推理阶段输入的模态相比于训练阶段有缺失)两种情况。
- 提出了5种针对不同模态数据的融合方法。
MDL-RS网络架构
这个网络包含两种形式,一种是pixel-wise结构的FC-Nets,另外一种是spatial-spectral结构的CNNs。FC-Nets和CNNs都包含两个阶段的网络,分别是Ex-Net(feature extraction)和Fu-Net(feature fusion)。
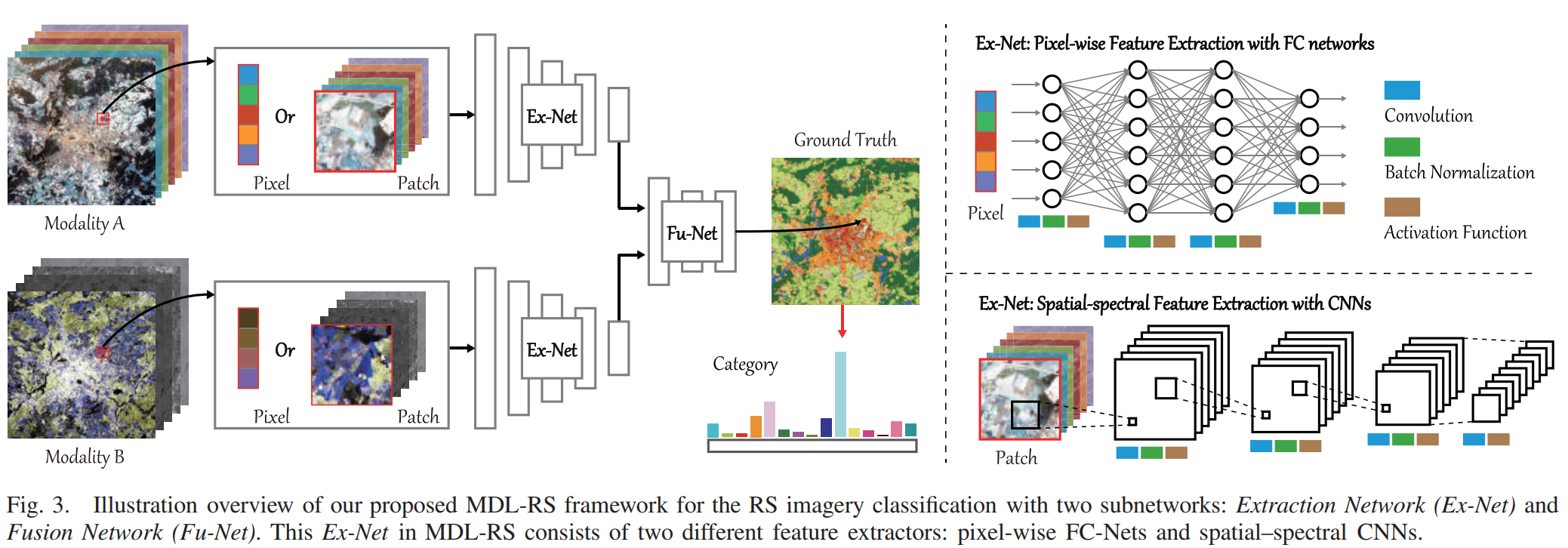
网络的具体架构如下:
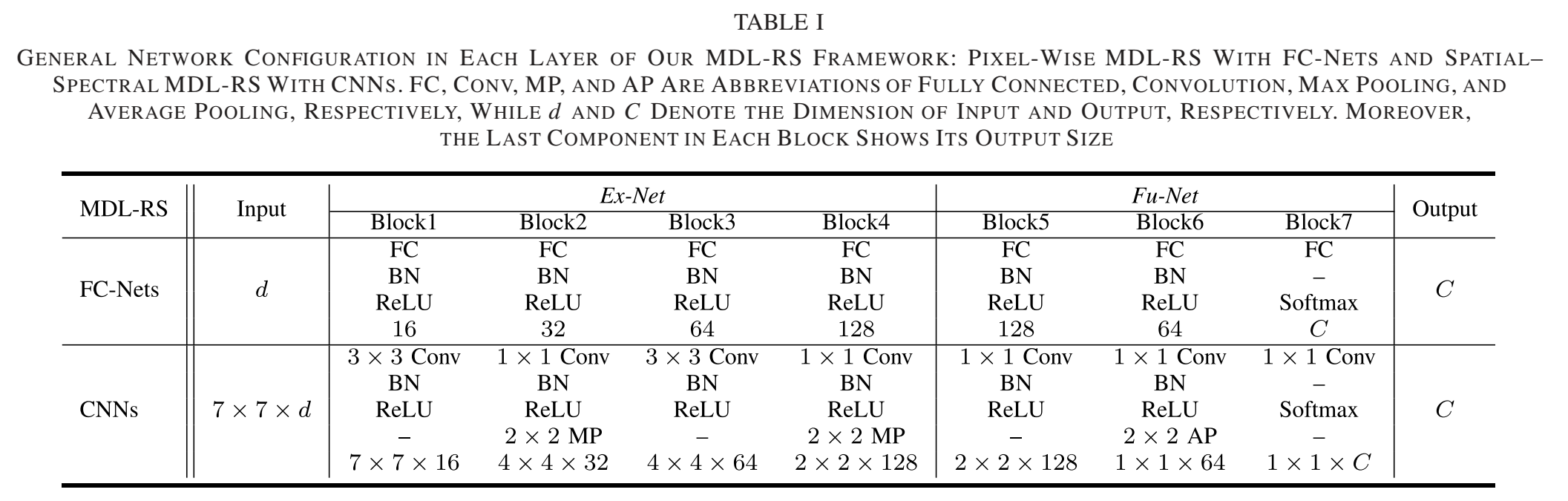
整体来说网络结构比较简单,比较值得看的是特征融合方法。
特征融合方法
本文提出了5种用于特征融合的方法,可以分为两类:Concatenation-Based Fusion和Compactness-Based Fusion。
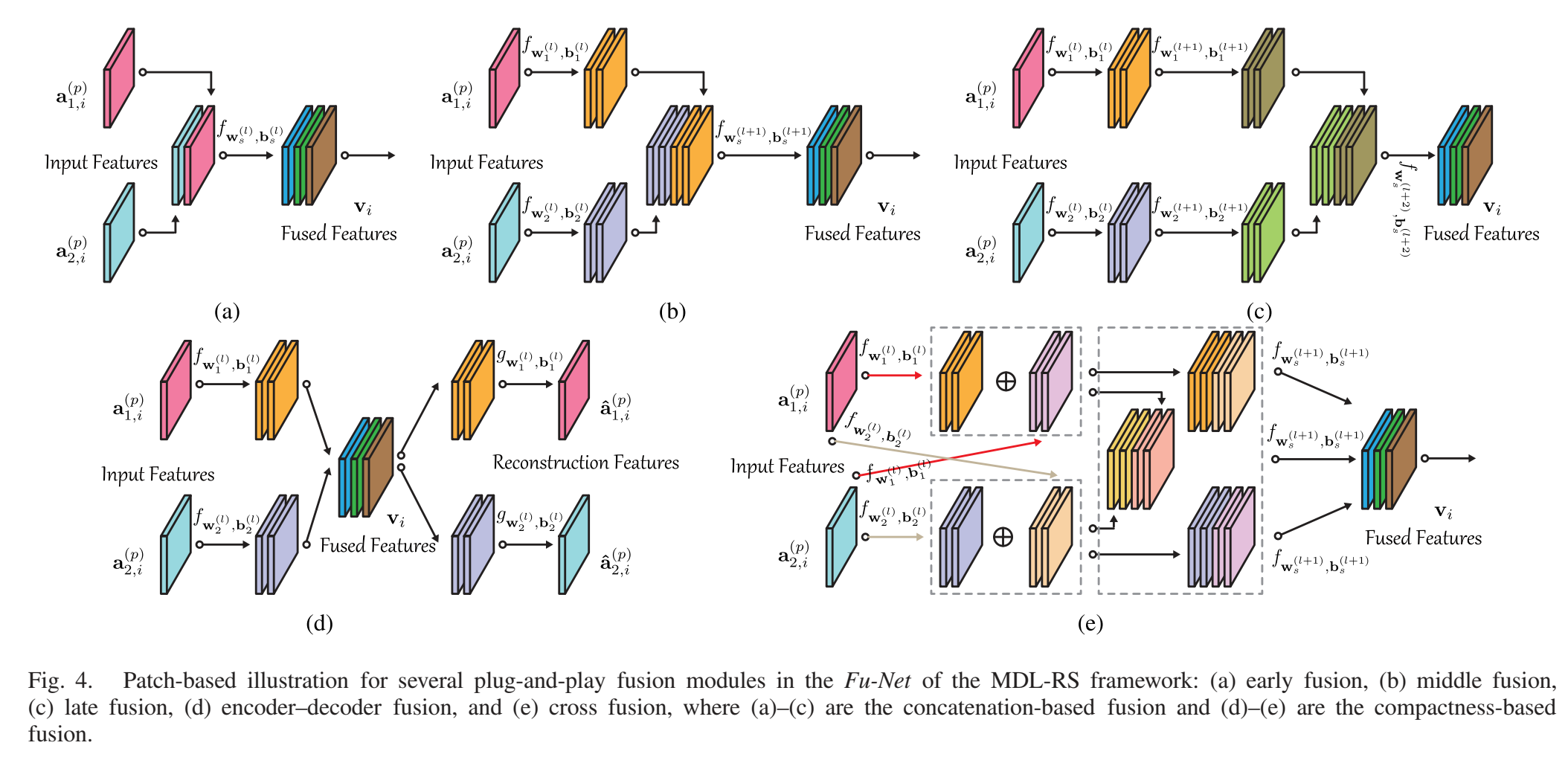
Concatenation-Based Fusion顾名思义,就是把得到的两个模态的特征图拼接起来,根据融合位置的不同,可以分为早期融合、中期融合和后期融合。早期融合将两个模态的数据在输入到神经网络之前进行融合(从源码来看其实就是一个单流网络)。中期和后期融合是在网络的中期和后期进行融合,是双流网络的架构。
Compactness-Based Fusion分为两种,分别是编码器-解码器融合和交叉融合。前者的通过最小化重构误差,最后将编码器的输出作为融合图像。后者公式:
针对这五种融合策略,作者做了实验发现,Concatenation-Based Fusion的方法,跨模态的神经元很少被激活,也就是说两个模态虽然被拼接到一块了,但其实并没有有效融合。Compactness-Based Fusion可以缓解这种问题,尤其是交叉融合的效果最显著。
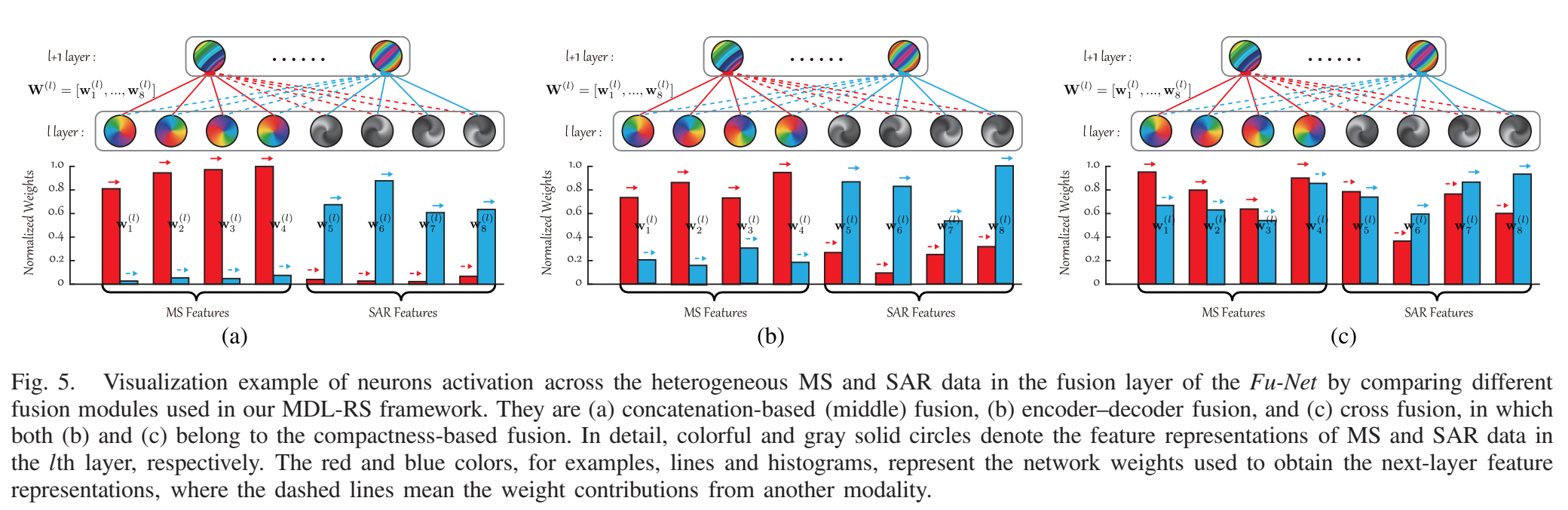
最后的实验结果上,融合方法最好的是交叉融合,尤其是在CML的实验中,交叉融合的优势更加显著。